
Source: CNSA
10-22-2007 10:05
 |
NOROS-1 is on development between the Polytechnic of Milan and the University of Aeronautics and Austronautics of Beijing. Begun in 2004, it previews the planning and the construction of a prototype of a family of robots for the exploration and the exploitation of the lunar ground.
The project of robot NOROS-1 (NOROS is for Novel Robot for Space exploration) is a head of diamond of the scientific and technological collaboration between China and Italy.
The concept of the project Noros-1 consists in the idea of a usable robotic system for the exploration of the lunar ground. It is compatible with the most meaningful technologies for the space programs and for the international scenes of research and development on space.
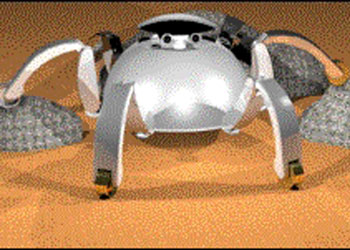
The robot has a semispherical shape, with legs and wheels for the movement, with cameras for vision and intelligent sensors in order to recognize the environment and in order to move in every condition. The width is of approximately 80 centimeters, the weight of approximately 40 kilograms (the gravity on the Moon is sixth regarding the Earth). The robot will be able to explore the ground, to establish fixed emplacements and structures, to represent also a base of control of signals and management of the space communication, and, accompanied from the flotilla of smaller robots, it will be able to construct support structures on the Moon. The main robot, larger, executes the more complex operations, while the small ones are adjuvant on the field. The robots move with legs/wheels, which are transformed according to the type of land and the movement that must be executed. The robots comprise nanosensors, intelligent control, intelligent management of sensors, with analogies with human decisional control.